Semi-Autonomous Manipulation Pipeline (AIST, Japan)¶
Research & Development | CNRS-AIST Joint Robotics Laboratory
Project Summary¶
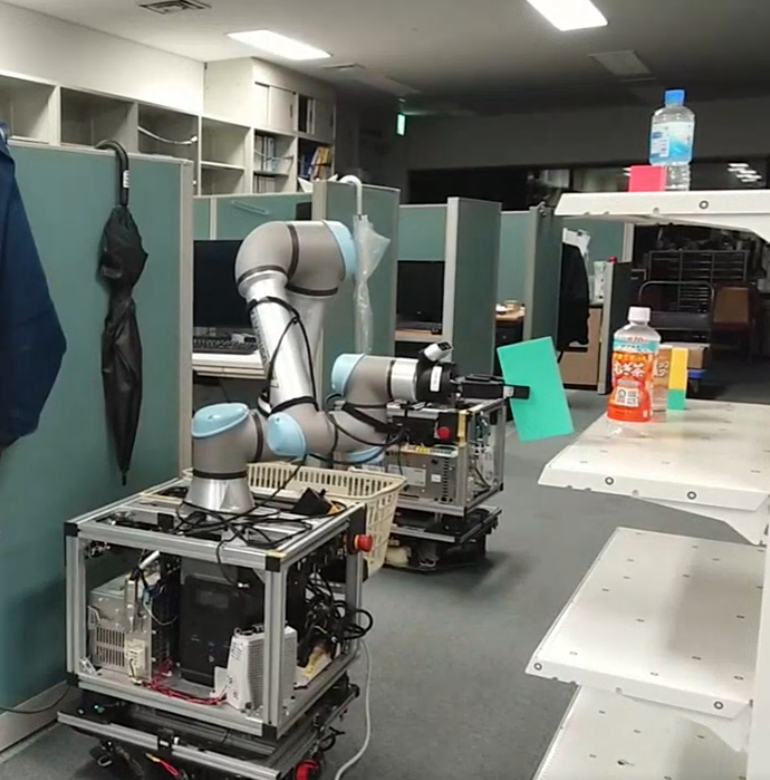
Designed and developed an advanced semi-autonomous manipulation pipeline specifically for retail applications.
Technical Architecture¶
- Core Technologies:
Point Cloud Library (PCL) - Advanced 3D perception and object segmentation
ROS2 Framework - Distributed robotics middleware with custom node orchestration
MoveIt2 - Sophisticated motion planning and collision avoidance
Docker Containers - Reproducible deployment and environment isolation
- Perception Pipeline:
Point cloud processing and object segmentation
Pose estimation and grasp point calculation
Octomap plugin for obstacle detection and avoidance
- Manipulation Strategy:
Adaptive grasp planning based on object geometry
Trajectory generation
Error recovery and re-planning capabilities
Research Contributions¶
Academic Publication “Development of a semi-autonomous manipulation pipeline for robotic shelf-picking operations”
Status: Presented at IEEE/SICE International Symposium on System Integration (SII2026)
Role: First Author